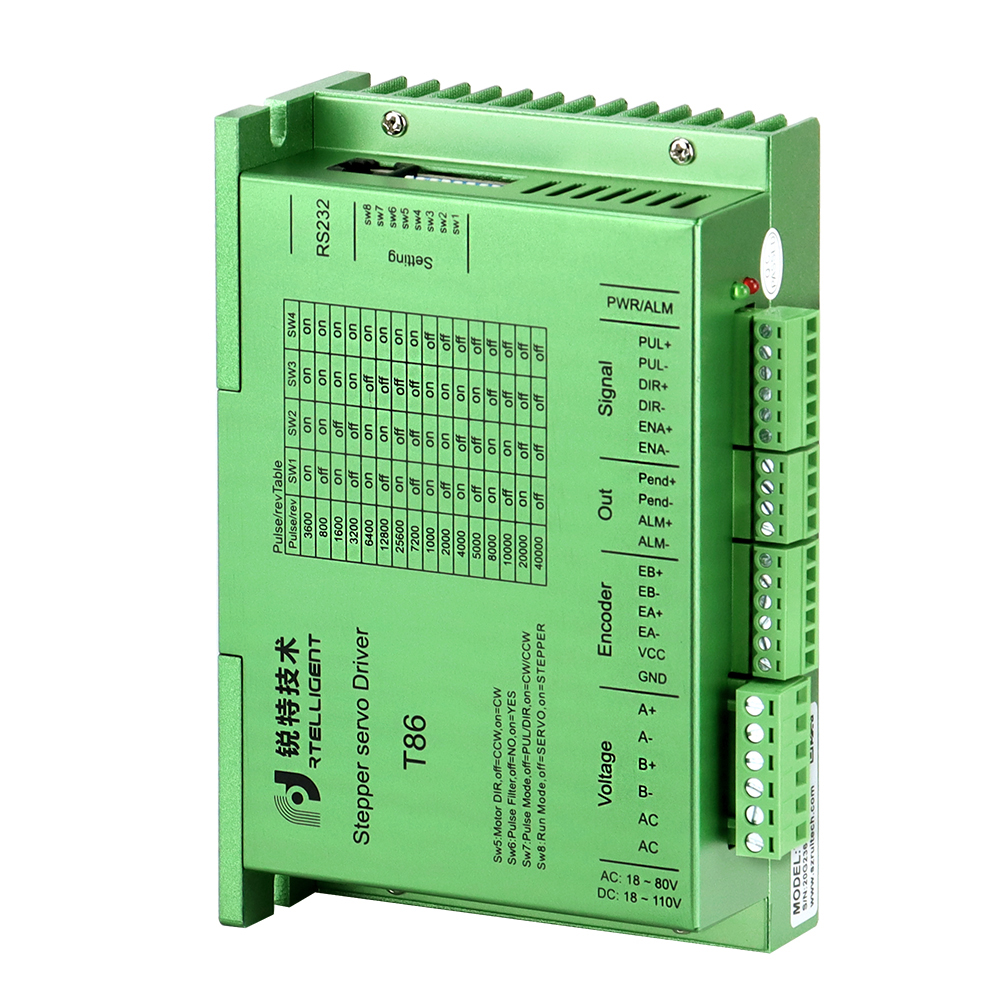




Pulse Control 2 Phase Paʻa Loop Stepper Drive T86


Hoʻolauna Huahana



Hoʻohui

Nā hiʻohiʻona
| Lako ikehu | 18-80VAC / 18–110VDC |
| Manao pololei | 4000 Pulse/r |
| ʻAno puʻupuʻu | Ke kuhikuhi a me ka pulupulu, CW/CCW pālua pulupulu |
| Ka mana o kēia manawa | Servo vector control algorithm |
| Nā hoʻonohonoho micro-stepping | Hoʻonohonoho hoʻololi DIP, a i ʻole hoʻonohonoho polokalamu hoʻoponopono |
| Laulā māmā | Maʻamau 1200 ~ 1500rpm, a hiki i 4000rpm |
| Kāohi ʻana i ka resonance | E helu ʻakomi i ke kiko resonance a keʻakeʻa i ka haʻalulu IF |
| Hoʻololi hoʻohālikelike PID | E hoʻāʻo i ka polokalamu e hoʻoponopono i nā ʻano PID kaʻa |
| Kānana puʻupuʻu | 2MHz kānana hōʻailona kikohoʻe |
| Hoʻopuka hoʻāla | ʻO ka hoʻopuka alaala o ka over-current, over-voltage, kūlana kuhi, etc |
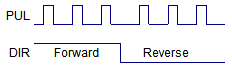
ʻAno Pulse
ʻO ka maʻamau T series mea hoʻokele hōʻailona hōʻailona ma ke ʻano o ka pulse, a hiki iā T86 ke loaʻa i ʻelua ʻano o nā hōʻailona kauoha pulse.
| Pulse a me ke kuhikuhi (PUL + DIR) |
|
| ʻO ka puʻupuʻu pālua (CW +CCW) | 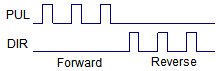 |
Hoʻonohonoho micro-stepping
| Pulse/rev | SW1 | SW2 | SW3 | SW4 | ʻŌlelo |
| 3600 | on | on | on | on | Hoʻololi ʻia ka hoʻololi DIP i ka mokuʻāina "3600" a hiki i ka polokalamu hoʻāʻo ke hoʻololi manuahi i nā māhele ʻē aʻe. |
| 800 | hemo | on | on | on | |
| 1600 | on | hemo | on | on | |
| 3200 | hemo | hemo | on | on | |
| 6400 | on | on | hemo | on | |
| 12800 | hemo | on | hemo | on | |
| 25600 | on | hemo | hemo | on | |
| 7200 | hemo | hemo | hemo | on | |
| 1000 | on | on | on | hemo | |
| 2000 | hemo | on | on | hemo | |
| 4000 | on | hemo | on | hemo | |
| 5000 | hemo | hemo | on | hemo | |
| 8000 | on | on | hemo | hemo | |
| 10000 | hemo | on | hemo | hemo | |
| 20000 | on | hemo | hemo | hemo | |
| 40000 | hemo | hemo | hemo | hemo |
Hōʻike huahana
Ke hoʻolauna nei i ka pulse-controlled two-phase closed-loop stepper driver, kahi huahana hoʻololi e hoʻohui i ka ʻenehana ʻokiʻoki me ka hana ʻokoʻa a me ka hilinaʻi. Hoʻolālā ʻia kēia mea hoʻokele stepper breakthrough e hoʻololi i ke ʻano o ka mālama ʻia ʻana o nā kaʻa pololei, e hōʻoia ana i ka pono kūpono a me ka pololei no nā ʻano noi.
ʻO kekahi o nā hiʻohiʻona nui o kēia mea hoʻokele stepper maikaʻi loa ʻo kāna ʻōnaehana pani pani, e hōʻoiaʻiʻo i ka mana pololei a hoʻopau i nā poho o ka pae, ʻoiai ma lalo o ke koi ʻana i nā kūlana hana. Me kāna mīkini hoʻomalu pulse holomua, e hōʻoiaʻiʻo ke kaʻa i ke kūlana pololei, ka hana maʻemaʻe a me ka haʻalulu haʻahaʻa, e hāʻawi ana i ka hana maikaʻi loa a me ke kūpaʻa.
ʻO ka pulse-controlled two-phase closed-loop stepper driver, he hoʻolālā paʻakikī a paʻa hoʻi a hoʻokomo i ka ʻenehana microprocessor hou loa. Hiki iā ia ke hoʻokō i ka puka torque kiʻekiʻe a mālama i nā ukana ʻoi aku ka nui, e kūpono ana no ka automation ʻoihana, robotics, CNC machine tool a me nā noi kiʻekiʻe kiʻekiʻe. ʻO kāna algorithm kaʻa kaʻa hoʻonā kiʻekiʻe e hōʻoia i ka mana o ka neʻe ʻana, e lilo ia i koho maikaʻi loa no nā hana e koi ana i ka neʻe paʻakikī.
Hoʻolako pū ʻia ke kaʻa me ka hoʻoponopono ponoʻī naʻauao e ʻike a hoʻoponopono i nā hewa a i ʻole nā hele. Mālama kēia i ka hana maʻamau a hōʻemi i ka pono no ka hoʻoponopono lima a i ʻole calibration, e mālama ana i nā mea hoʻohana i ka manawa a me ka hoʻoikaika.
Hoʻohui ʻia, ʻoi aku ka maʻalahi o ka hoʻokele ʻana i ka pulse-controlled two-phase closed-loop stepper drive a kūpono me nā ʻano kaʻa like ʻole, me ka bipolar a me ka unipolar stepper motors. ʻO kāna mea hoʻohui maʻalahi a me ka papa mana hoʻohana e maʻalahi i ka hoʻohui ʻana a me ka hana maʻalahi me nā ʻōnaehana i loaʻa, e hōʻemi ana i ka manawa hoʻonohonoho a me ka paʻakikī.
I ka hōʻuluʻulu manaʻo, ʻo ka Pulse Controlled Two-Phase Closed Loop Stepper Driver he huahana hoʻololi pāʻani e hoʻohui i ka hana hou, pololei a me ka hilinaʻi i hoʻokahi mea ikaika. ʻO kāna mau hiʻohiʻona like ʻole e like me ka hoʻopaʻa ʻana i ka loop control, nā mīkini hoʻokele pulse holomua, nā mana hoʻoponopono ponoʻī a me ka versatility i kūpono no nā noi e koi ana i ka pololei kiʻekiʻe a me ka pono. E ʻike i ka wā e hiki mai ana o ka mana kaʻa stepper a wehe i nā pae hou o ka hana a me ka huahana me kēia huahana kūʻokoʻa.
-
 Hoʻoponopono i ka palapala hoʻohana Rtelligent T86
Hoʻoponopono i ka palapala hoʻohana Rtelligent T86