Hoʻokahi -holo-ʻelua Stepper Drive R60-D


Hoʻolauna Huahana
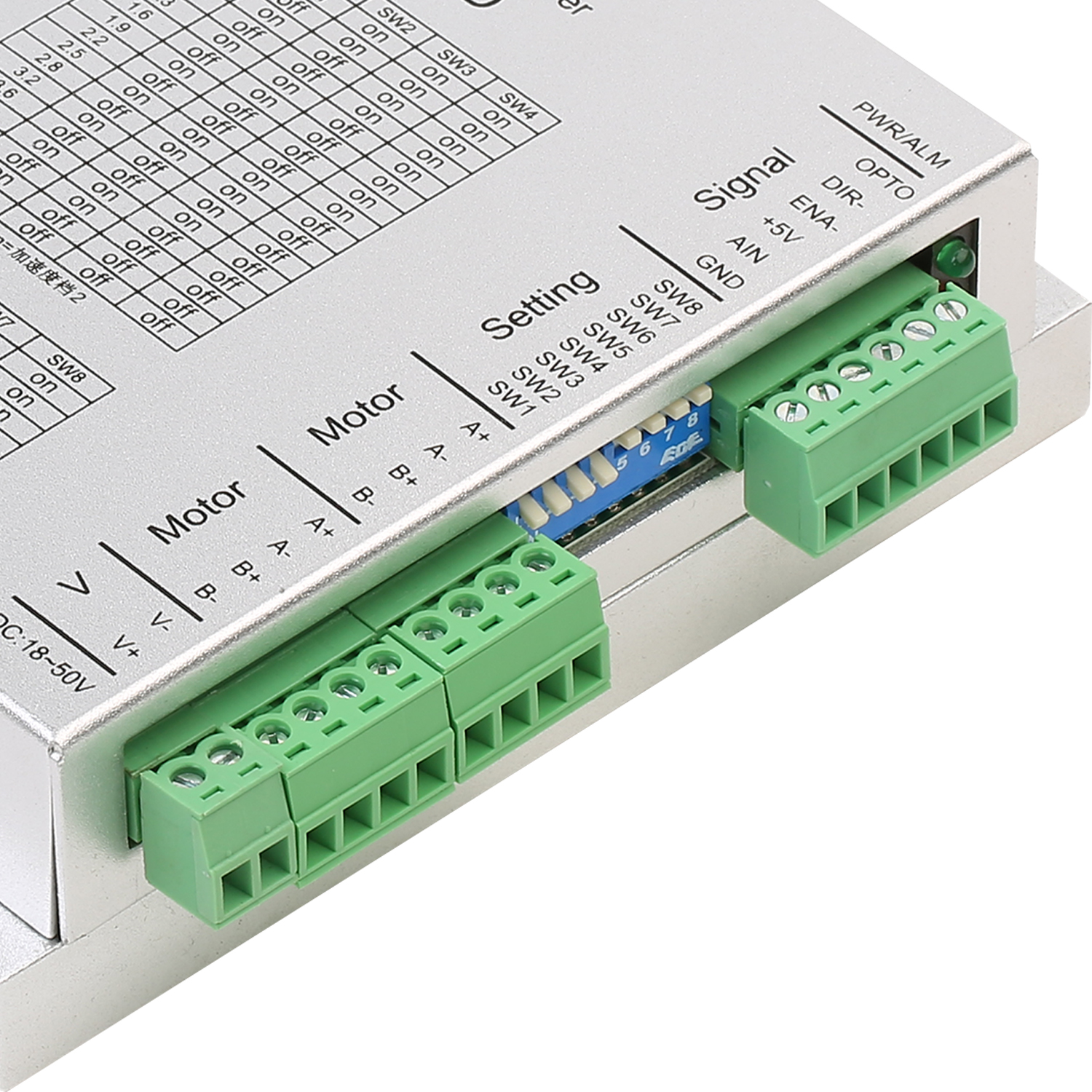


Hoʻohui
Uea hoailona hoomalu
| Hana | Maka | Wehewehe |
| ʻO ka pahu hoʻokomo mana | V+ | Hoʻokomo i ka mana DC maikaʻi |
| V- | Hoʻokomo ʻole ka mana mana DC | |
| Kaa 1 Terminal | A+ | Hoʻohui i ka moto 1 A pau ka wili ʻana |
| A- | ||
| B+ | E hoʻohui i ka ʻāpana 1 B i nā ʻaoʻao ʻelua | |
| B- | ||
| Kaʻa 2 Terminal | A+ | Hoʻohui i ka moto 2 A pau ka wili ʻana |
| A- | ||
| B+ | E hoʻohui i ka ʻāpana 2 B i nā ʻaoʻao ʻelua | |
| B- | ||
| awa hoʻomalu māmā | +5V | Potentiometer hema hope |
| AIN | ʻO ka pahu hoʻoponopono potentiometer | |
| GND | Potentiometer welau akau | |
| E hoʻomaka a hoʻohuli (Pono e hoʻopili pōkole ʻo AIN a me GND inā ʻaʻole pili i ka potentiometer) | OPTO | 24V mana lako mana kūpono |
| DIR- | ʻO ka pahu hoʻohuli | |
| ENA- | E hoʻomaka i ka pahu |
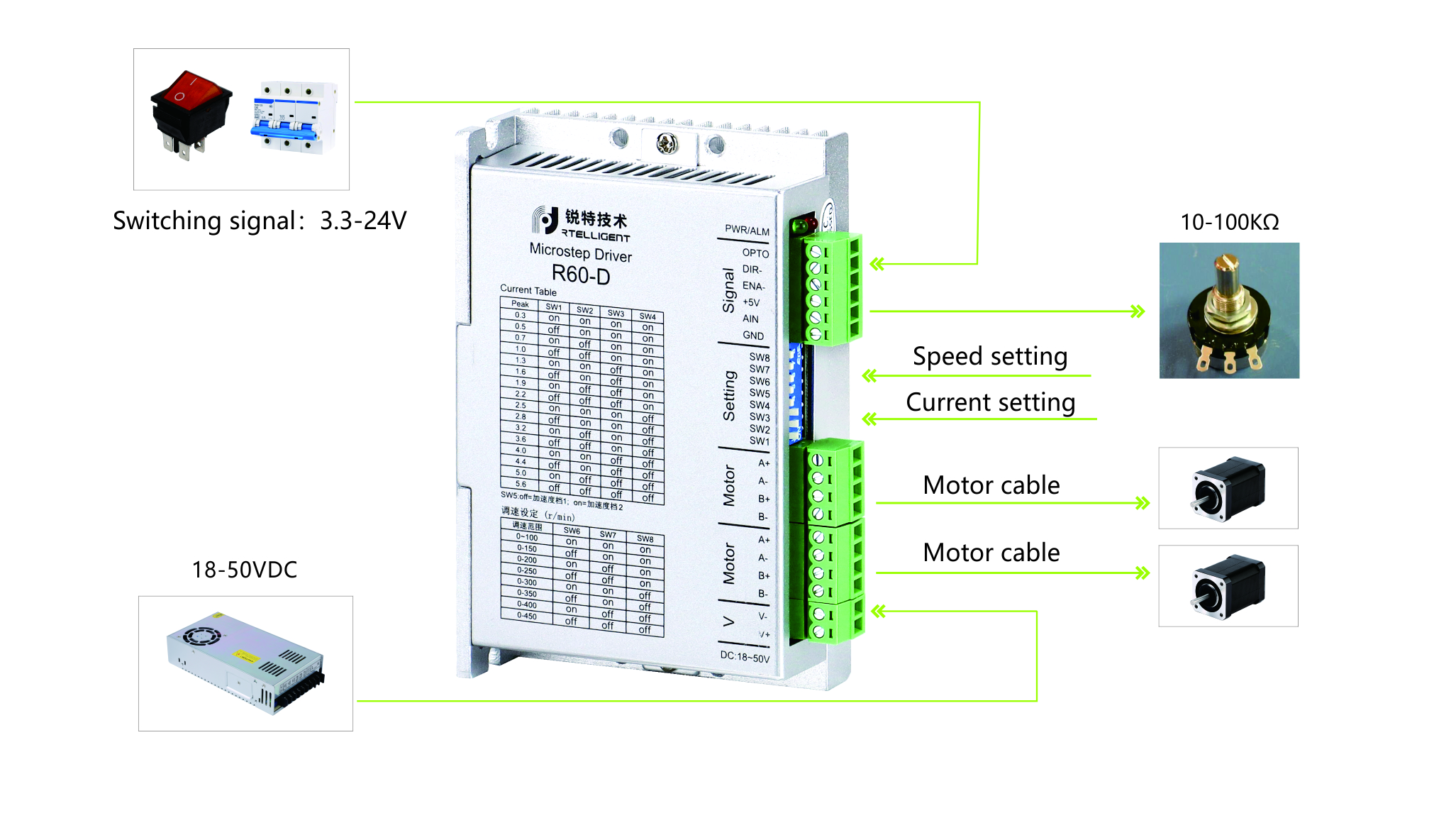
Hoʻonohonoho o kēia manawa
| ʻO ka ʻoi loa o kēia manawa (A) | SW1 | SW2 | SW3 | SW4 | ʻŌlelo |
| 0.3 | ON | ON | ON | ON | Hiki ke hoʻopilikino ʻia nā waiwai ʻē aʻe o kēia manawa |
| 0.5 | PAU | ON | ON | ON | |
| 0.7 | ON | PAU | ON | ON | |
| 1.0 | PAU | PAU | ON | ON | |
| 1.3 | ON | ON | PAU | ON | |
| 1.6 | PAU | ON | PAU | ON | |
| 1.9 | ON | PAU | PAU | ON | |
| 2.2 | PAU | PAU | PAU | ON | |
| 2.5 | ON | ON | ON | PAU | |
| 2.8 | PAU | ON | ON | PAU | |
| 3.2 | ON | PAU | ON | PAU | |
| 3.6 | PAU | PAU | ON | PAU | |
| 4.0 | ON | ON | PAU | PAU | |
| 4.4 | PAU | ON | PAU | PAU | |
| 5.0 | ON | PAU | PAU | PAU | |
| 5.6 | PAU | PAU | PAU | PAU |
Hoʻonohonoho micro-stepping
| Laulā māmā | SW4 | SW5 | SW6 | ʻŌlelo |
| 0~100 | ON | ON | ON | Hiki ke hoʻopilikino ʻia nā pae wikiwiki ʻē aʻe |
| 0~150 | PAU | ON | ON | |
| 0~200 | ON | PAU | ON | |
| 0~250 | PAU | PAU | ON | |
| 0~300 | ON | ON | PAU | |
| 0~350 | PAU | ON | PAU | |
| 0~400 | ON | PAU | PAU | |
| 0~450 | PAU | PAU | PAU |
ʻIke Huahana
Ke hoʻolauna nei i ka R60-D hoʻokahi kaʻa hoʻokele pālua stepper, kahi huahana hoʻololi pāʻani e lawe mai i ka ʻenehana holomua i ka honua o nā kaʻa stepper. Me kāna mau hiʻohiʻona ʻokoʻa a me ka hana like ʻole, e wehewehe hou ka R60-D i ke ala āu e ʻike ai i ka mana kaʻa.
Hoʻolālā ʻia ka R60-D no nā noi e koi ana i ka mana pololei a me ka maikaʻi o nā kaʻa stepper ʻelua. Inā he robot, mīkini CNC a ʻōnaehana automation paha, hoʻohiki kēia mea hoʻokele i nā hopena maikaʻi loa. Me kona ʻano kumu paʻa a me ke kaʻina hoʻonohonoho maʻalahi, ʻo ka hoʻohui ʻana i ka R60-D i kāu ʻōnaehana e kū nei he makani.
ʻO kekahi o nā hiʻohiʻona koʻikoʻi o ka R60-D ʻo ia ka hiki ke hoʻomalu i ʻelua mau kaʻa stepper kūʻokoʻa. Hāʻawi kēia i nā neʻe like a me ka synchronized, e hoʻonui ai i ka pololei a me ka pololei o kāu mau hoʻolālā. Kākoʻo ka mea hoʻokele i nā ʻano hoʻoholo ʻanuʻu mai nā ʻanuʻu piha a hiki i nā microsteps, hāʻawi iā ʻoe i ka mana piha i ka neʻe ʻana o ka kaʻa.
ʻO kekahi hiʻohiʻona ʻē aʻe o ka R60-D ʻo kāna ʻenehana hoʻokele holomua o kēia manawa. Hoʻohana ka mea hoʻokele i nā algorithms paʻakikī e hōʻoia i ka hāʻawi ʻana i kēia manawa i nā kaʻa stepper, e hopena i ka neʻe ʻana a pololei. ʻAʻole hoʻomaikaʻi wale kēia ʻenehana i ka hana holoʻokoʻa o ka ʻōnaehana akā hoʻonui pū i ke ola o ke kaʻa ma ka hoʻemi ʻana i ka hana wela.
Hoʻohui ʻia, hōʻike ka R60-D i kahi ʻōnaehana pale ikaika e pale i kāu kaʻa mai ka pōʻino. Hoʻohui ia i ka overcurrent, overvoltage a me ka overheating me nā mīkini pale e hōʻoia i ka palekana o kāu kaʻa ma lalo o nā kūlana hana paʻakikī. Hoʻokomo pū ka drive i kahi hōʻailona hoʻopuka hewa i hiki ke hoʻopili ʻia i kahi hāmeʻa alarm waho, e hāʻawi ana i kahi palekana hou aʻe.
Hoʻolālā ʻia ka R60-D no ka maʻalahi o ka hoʻohana ʻana, me kahi hōʻike LED māmā a me nā pihi mana intuitive. Hāʻawi kēia i ka hoʻonohonoho maʻalahi a me ka nānā ʻana i nā ʻāpana like ʻole e like me ke kaʻa o kēia manawa, ka hoʻonā ʻanuʻu a me nā pihi acceleration/deceleration. Ma ka hoʻoponopono maikaʻi ʻana i kēia mau hoʻonohonoho, hiki iā ʻoe ke hoʻokō i ka hana o ka kaʻa e hoʻokō i kāu mau pono kikoʻī.
ʻO ka hōʻuluʻulu manaʻo, ʻo ka R60-D hoʻokahi kaʻa lua stepper mea hoʻokele he huahana ʻokiʻoki e hoʻohui i ka ʻenehana holomua me nā hiʻohiʻona kiʻekiʻe. ʻO kona hiki ke hoʻomalu kūʻokoʻa i ʻelua mau kaʻa stepper, i hui pū ʻia me ka ʻenehana mana o kēia manawa a me nā ʻōnaehana pale ikaika, kūpono ia no nā noi e koi ana i ka mana kaʻa kaʻa pololei. Me ka R60-D, hiki iā ʻoe ke lawe i kāu mau hoʻolālā i nā kiʻekiʻe kiʻekiʻe a loaʻa nā hopena koʻikoʻi.
-
 Palapala Hoʻohana Rtelligent R60-D
Palapala Hoʻohana Rtelligent R60-D